14. Parameter Optimization
Parameter Optimization - Artificial Intelligence for Robotics
In the following quiz you'll implement the twiddle algorithm for a PID controller. Additionally, the robot has a steering drift!
Start Quiz:
INSTRUCTOR NOTE:
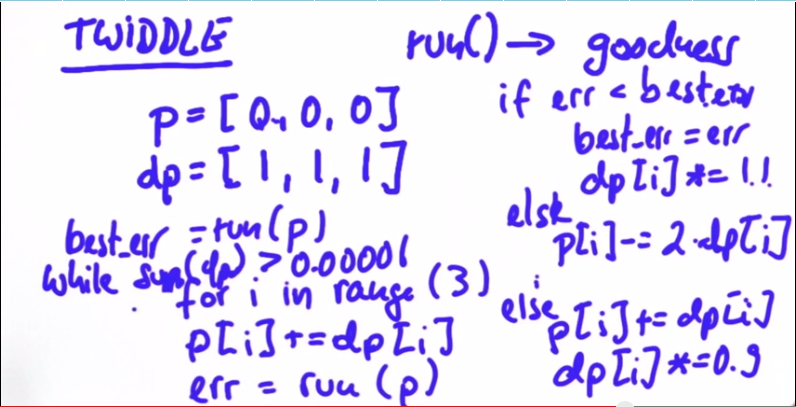
Twiddle notes: